Cygnus Ruimtevaartuig

Het Cygnus-ruimtevaartuig is een onbemand vrachtruimtevaartuig dat is ontworpen en wordt geëxploiteerd door Orbital Sciences Corporation.
Het Cygnus-programma begon als onderdeel van NASA’s Commercial Orbital Transportation Services Program (COTS) en komt in het Commercial Resupply Services Program zodra het zijn eerste demonstratievlucht heeft voltooid.
Cygnus vervoert lading onder druk naar het internationale ruimtestation.
Het ruimtevaartuig wordt gelanceerd boven op Orbital’s Antares-raket die opstijgt van de Mid-Atlantic Regional Spaceport, Virginia. Cygnus kan geen lading naar de aarde terugbrengen en verbrandt bij de terugkeer in de dampkring om zichzelf en de overbodig geworden voorwerpen uit het ISS te verwijderen.
| Standard | Enhanced | |
| Lengte | 5.14m | 6.39m |
| Diameter | 3.07m | 3.07m |
| Droge massa | 1,500kg | 1,800kg |
| Drukvolume | 18.9m³ | 27m³ |
| Ladingsmassa | 2.000kg | 3.500kg |
| Ladingsmassa | 1.200kg | 3,500kg |
| Endurance | 2 Maanden | 66 Dagen |
| Solar Arrays | Dutch Space | ATK Ultra Flex |
| RNDZ Nav | TriDAR | TriDAR |
Cygnus bestaat uit een drukvrachtmodule die is gebouwd door het Italiaanse Thales Alenia Space en een dienstmodule die is gebouwd door Orbital, gebaseerd op Orbital’s GEOStar Satelliet Bus en Dawn ruimtevaartuig elementen om kosten en risico’s te verminderen.
Cygnus is geboekt voor een enkele COTS-demomissie naar ISS en in totaal acht CRS-vluchten. Voor de eerste vier vluchten vliegt Cygnus in zijn standaardconfiguratie. Wanneer de Antares wordt opgewaardeerd met de Castor 30 XL tweede trap, zal Cygnus overschakelen naar de verbeterde versie om meer lading naar ISS te vervoeren. De standaardconfiguratie van Cygnus vervoert 2.000 kg lading naar het ISS, terwijl de verbeterde versie een laadvermogen heeft van 3.500 kg, beperkt door de prestaties van de draagraket.
Cygnus kan worden geladen met meer dan drie ton afval en niet langer noodzakelijke items voor zijn vurige terugkeer naar de aarde.

Drukvrachtmodule

Cygnus standaard en Cygnus enhanced gebruiken drukvrachtmodules gebouwd door Thales Alenia Space, Italië. De module is gebaseerd op de Multi Purpose Logistics Module die werd gevlogen op meerdere Space Shuttle-missies om lading onder druk te leveren aan het ISS.
Het is 3,07 meter in diameter en heeft een lengte van 3,66 meter in de standaardconfiguratie en 5,05 meter met een segment toegevoegd in de verbeterde configuratie. De standaard PCM heeft een drooggewicht van 1.500 kg en de verbeterde versie weegt 1.800 kg. In de standaard PCM kan 2.700 kg lading worden verpakt, terwijl in de uitgebreide versie 800 kg meer kan worden geladen. De laadmodule heeft een volume onder druk van 18,9 kubieke meter in de standaardconfiguratie en 27 kubieke meter in de uitgebreide configuratie. Het stroomverbruik van de PCM is minder dan 850 watt.
De PCM is voorzien van een luik van 94 bij 94 centimeter dat is geïntegreerd in de 127 centimeter grote gemeenschappelijke ring voor het aanlegmechanisme. Net als alle andere bezoekende voertuigen heeft Cygnus de passieve kant van het CBM, terwijl ISS is uitgerust met een actief Common Berthing Mechanism.
De PCM kan 3.500 kg lading bevatten voor verwijdering via destructieve re-entry.
Service Module

De Cygnus Servicemodule bevindt zich in het achterste gedeelte van het ruimtevaartuig en zorgt voor de & opslag van energie, voertuigbesturing, voortstuwing, geleiding en de grijparm voor de robotarm van het station. De SM is gebaseerd op Orbital’s GEOStar-satellietbus en maakt gebruik van elementen van NASA’s Dawn-ruimtevaartuig dat door Orbital is vervaardigd. Het meet 3,23 meter in diameter en 1,29 meter in hoogte.
SM is uitgerust met inzetbare zonnepanelen, batterijen en avionica voor energieopwekking, -opslag en -distributie. De zonnepanelen wekken tot 4 kilowatt elektrisch vermogen op.
De standaard Cygnus heeft twee zonnepanelen met drie panelen, geleverd door Dutch Space. De verbeterde Cygnus heeft Ultra Flex zonnepanelen, gebouwd door Alliant Techsystems, ATK. De cirkelvormige arrays worden ontplooid door aandrijfmotoren en zijn van een lichtgewicht ontwerp met 25% van de massa van typische zonnepanelen bestaande uit panelen. Bovendien zijn de arrays van ATK compacter wanneer ze zijn opgeborgen. De arrays leveren 3.500 Watt vermogen wanneer Cygnus in een zonnestand vliegt.
De SM bevat ook het hoofdvoortstuwings- en standregelsysteem van het ruimtevaartuig. Cygnus is uitgerust met IHI BT-4 stuwraketten voor baanaanpassingsmanoeuvres. BT-4 is ontwikkeld door IHI Aerospace, Japan en heeft een drooggewicht van 4 kilogram en een lengte van 0,65 meter. De motor levert 450 Newton stuwkracht door gebruik te maken van Monomethylhydrazine brandstof en Stikstof Tetroxide oxidator. De stuwstoffen zijn opgeslagen in bolvormige tanks die onder druk staan met Helium. Het Attitude Control System van Cygnus wordt gebruikt voor heroriëntatie en kleine rendez-vous brandwonden met behulp van 32 monopropellant stuwraketten elk met een nominale stuwkrachtinstelling van 31 Newton.
De Service Module is ook uitgerust met het Guidance, Navigation and Control systeem van het voertuig, evenals communicatieapparatuur om te communiceren met grondstations, ISS en het Tracking and Data Relay Satellite System.

Cygnus is uitgerust met Star Trackers en een absoluut GPS-systeem om tijdens de vrije vlucht zijn positie in een baan om de aarde te bepalen. Tijdens het rendez-vous met het internationale ruimtestation schakelt Cygnus over op relatieve GPS om zijn positie ten opzichte van het ISS te bepalen. Wanneer nabijheidsoperaties beginnen, begint Cygnus zijn nabijheidsnavigatiesysteem te gebruiken.
Cygnus gebruikt een TriDAR-systeem ontwikkeld door Neptec. TriDAR, of Triangulation and LIDAR Automated Rendezvous and Docking, is een rendez-vous navigatiesysteem dat niet afhankelijk is van enige referentie markers geplaatst op zijn doel. In plaats daarvan gebruikt TriDAR een 3D-sensor op basis van een laser en warmtebeeldcamera’s om 3D-gegevens van zijn doel te verzamelen die door software worden vergeleken met de bekende vorm van het ruimtevaartuig van het doel. Dit stelt TriDAR in staat de relatieve positie, het bereik en de relatieve snelheid te berekenen. Het computeralgoritme is in staat om de 6 Degree Of Freedom (6DOF) relatieve pose in real time te berekenen met behulp van een More Information Less Data (MILD) benadering. “TriDAR werkt op afstanden van 0,5 meter tot meer dan 2000 meter zonder in te boeten aan snelheid of precisie aan beide uiteinden van het bereik”, aldus Neptec op de website van het bedrijf.
ISS gezien door Tridar
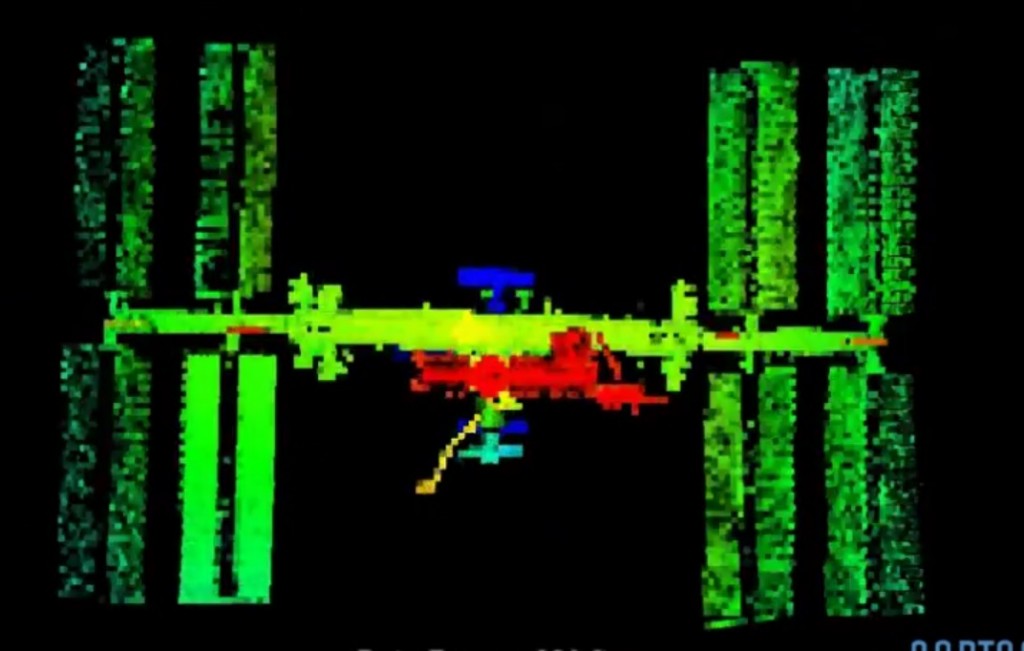
TriDAR’s 3D-sensor combineert autosynchrone lasertriangulatietechnologie met laserradar (LIDAR) in één enkel pakket om volggegevens op korte en lange afstand te leveren.
Het lasertriangulatiesysteem is gebaseerd op het lasercamerasysteem (LCS) dat werd gebruikt op het Orbiter Boom Sensor System van de Space Shuttle, dat werd gebruikt om inspecties van het hitteschild van het voertuig in een baan om de aarde uit te voeren.
TriDAR biedt de functionaliteit van twee 3D-scanners door de optische paden van de twee actieve subsystemen te multiplexen. De warmtebeeldcamera wordt gebruikt om het bereik van het systeem uit te breiden buiten het operationele bereik van LIDAR.
TriDAR werd getest in de ruimte op Space Shuttle Missies STS-128, STS-131 en de laatste Shuttle Vlucht, STS-135.
Tijdens STS-135 begon TriDAR met het volgen van het ISS vanaf 34 kilometer tot aan de koppeling, en tijdens de ontkoppeling leverde het systeem indrukwekkende beelden van het ISS, waarbij 3D- en thermische beelden van het Station werden gemaakt als onderdeel van de laatste op de Shuttle gebaseerde flyaround van het ISS.
Vluchtprofiel


Cygnus wordt gelanceerd boven op de Antares-raket van Orbital, die hem 630 seconden na de lancering naar een baan van 250 bij 275 kilometer brengt met een hoek van 51,66 graden. Van daaruit begint Cygnus met baanaanpassingen en faseringsmanoeuvres om zich te verbinden met het ISS dat in een baan om de aarde draait op een hoogte van 410 kilometer. In de loop van het eerste deel van de vlucht activeert Cygnus zijn zenders en ontplooit zijn zonnepanelen.
Ook ondergaat het voertuig een aantal controles om ervoor te zorgen dat alle systemen werken zoals ontworpen. Met behulp van ster trackers en GPS, Cygnus voert verschillende motor brandwonden om de hoogte te verhogen om dicht bij ISS te komen.
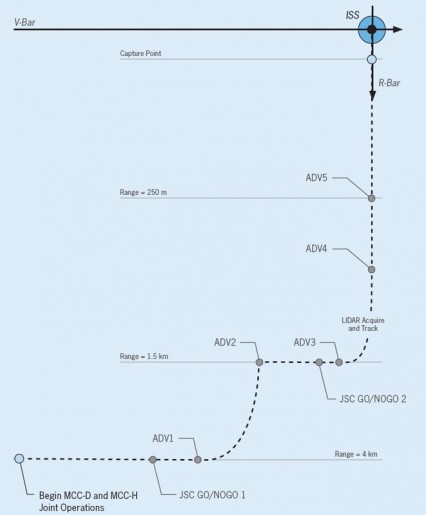
Eenmaal in de 28-kilometer communicatie zone rond ISS, schakelt het voertuig over naar relatieve GPS, communiceren met GPS-systemen van ISS om zijn relatieve positie ten opzichte van het station te berekenen. Cygnus nadert ISS op de R-Bar, komend van direct onder ISS. Naarmate het voertuig dichter bij het ISS komt, schakelt het over op zijn TriDAR-naderingsnavigatiesysteem om door te gaan met de eindnadering.
De bemanningsleden aan boord van het ISS kunnen met Cygnus communiceren via het bemanningscommandopaneel, mocht er tijdens het rendez-vous iets abnormaals gebeuren. Eenmaal op 10 meter van het ISS, stopt Cygnus zijn nadering en gaat in Free Drift om te worden opgevangen door Canadarm2. De robotarm van het ruimtestation wordt bestuurd door bemanningsleden van het ISS om het ruimtevaartuig vast te grijpen.
Eenmaal vastgegrepen, wordt Cygnus vastgemaakt aan de nadir CBM van de Harmony-module van het ISS. Na het vastzetten worden de lekken gecontroleerd en worden de luiken tussen ISS en Cygnus geopend zodat de bemanningsleden toegang krijgen tot de vrachtmodule. In de loop van de gedockte missie, meestal 30 dagen, verplaatsen bemanningsleden lading van Cygnus naar ISS en laden het voertuig met afval en niet langer benodigde items.
Zodra de luiken weer zijn gesloten, beweegt Canadarm2 Cygnus terug naar 10 meter en laat het voertuig los dat vervolgens een aantal motorbrandingen uitvoert om de buurt van ISS te verlaten. Eenmaal op een veilige afstand, voert Cygnus zijn deorbit burn uit om terug te keren in de atmosfeer boven de Stille Oceaan. Tijdens de terugkeer in de dampkring breekt het voertuig en verbrandt het tot op zekere hoogte voordat de overlevende fragmenten in de Stille Oceaan vallen, ver weg van bevolkte landmassa’s.
