Sonda kosmiczna Cygnus

.
Samolot kosmiczny Cygnus to bezzałogowy statek kosmiczny do dostarczania ładunków zaprojektowany i obsługiwany przez Orbital Sciences Corporation.
Program Cygnus rozpoczął się jako część NASA’s Commercial Orbital Transportation Services Program (COTS) i wchodzi do Commercial Resupply Services Program po ukończeniu swojego pierwszego lotu demonstracyjnego.
Cygnus transportuje ładunki pod ciśnieniem do Międzynarodowej Stacji Kosmicznej.
Samolot jest wystrzeliwany na szczycie rakiety Antares firmy Orbital z Mid-Atlantic Regional Spaceport w Wirginii. Cygnus nie jest w stanie zwrócić ładunku na Ziemię i spala się podczas ponownego wejścia, aby pozbyć się siebie i niepotrzebnych już przedmiotów z ISS.
| Standard | Enhanced | |
| Długość | 5.14m | 6,39m |
| Średnica | 3,07m | 3.07m |
| Masa sucha | 1,500kg | 1,800kg |
| Pojemność ciśnieniowa | 18.9m³ | 27m³ |
| Cargo Mass | 2,000kg | 3,500kg |
| Disposal Payload | 1,200kg | 3,500kg |
| Wytrzymałość | 2 Miesiące | 66 Dni |
| Tarcze słoneczne | Kosmos holenderski | ATK Ultra Flex |
| RNDZ Nav | TriDAR | TriDAR |
Cygnus składa się z ciśnieniowego modułu ładunkowego zbudowanego przez Thales Alenia Space z Włoch oraz modułu serwisowego zbudowanego przez Orbital, w oparciu o GEOStar Satellite Bus firmy Orbital i elementy statku kosmicznego Dawn w celu zmniejszenia kosztów i ryzyka.
Cygnus jest zarezerwowany na jedną misję demonstracyjną COTS do ISS i w sumie osiem lotów CRS. Przez pierwsze cztery loty Cygnus leci w swojej standardowej konfiguracji. Po doposażeniu Antaresa w drugi stopień Castor 30 XL, Cygnus przejdzie na ulepszoną wersję, która pozwoli na przewiezienie większej ilości ładunku do ISS. Cygnus standardowo przewozi 2000 kg ładunku do ISS, podczas gdy ulepszona wersja ma zdolność do przewożenia ładunku o wadze 3500 kg, ograniczoną przez wydajność rakiety nośnej.
Cygnus może zostać załadowany ponad trzema tonami metrycznymi śmieci i niepotrzebnych już przedmiotów na swój ognisty powrót na Ziemię.

Pressurized Cargo Module

Cygnus standardowy i Cygnus rozszerzony używają Pressurized Cargo Modules zbudowanych przez Thales Alenia Space, Włochy. Moduł bazuje na wielozadaniowym module logistycznym, który był wykorzystywany w wielu misjach wahadłowców kosmicznych do dostarczania ładunków pod ciśnieniem na ISS.
Moduł ma średnicę 3,07 metra i długość 3,66 metra w konfiguracji standardowej oraz 5,05 metra z jednym segmentem dodanym w konfiguracji rozszerzonej. Standardowy PCM ma masę 1 500 kilogramów w stanie suchym, a wersja wzmocniona waży 1 800 kilogramów. Do standardowego PCM można zapakować 2700 kilogramów ładunku, podczas gdy wersja wzmocniona pozwala na załadowanie 800 kilogramów więcej. Pojemność modułu ładunkowego wynosi 18,9 metrów sześciennych w konfiguracji standardowej i 27 metrów sześciennych w konfiguracji rozszerzonej. Zużycie energii przez PCM wynosi mniej niż 850 watów.
PCM posiada właz o wymiarach 94 na 94 centymetry, który jest zintegrowany ze 127-centymetrowym pierścieniem wspólnego mechanizmu cumowniczego. Podobnie jak wszystkie inne pojazdy wizytujące, Cygnus posiada pasywną stronę CBM, podczas gdy ISS jest wyposażona w aktywny Common Berthing Mechanism.
PCM jest w stanie pomieścić 3500 kg ładunku do usunięcia poprzez destrukcyjne ponowne wejście.
Moduł serwisowy

Umieszczony w rufowej części statku kosmicznego, moduł serwisowy Cygnus zapewnia wytwarzanie energii & magazynowanie, sterowanie pojazdem, napęd, naprowadzanie oraz Grapple Fixture dla ramienia robotycznego Stacji. SM jest oparty na GEOStar Satellite Bus firmy Orbital i wykorzystuje elementy statku kosmicznego NASA Dawn, który został wyprodukowany przez Orbital. mierzy 3,23 metra średnicy i 1,29 metra wysokości.
SM jest wyposażony w rozmieszczane tablice słoneczne, baterie i awionikę do wytwarzania, przechowywania i dystrybucji energii. Matryce słoneczne wygenerują do 4 kilowatów mocy elektrycznej.
Standardowy Cygnus posiada dwie trzypanelowe matryce słoneczne dostarczone przez Dutch Space. Ulepszony Cygnus posiada Ultra Flex Solar Arrays zbudowane przez Alliant Techsystems, ATK. Okrągłe baterie rozmieszczane są za pomocą silników napędowych i mają lekką konstrukcję o masie 25% masy typowych baterii słonecznych składających się z paneli. Ponadto, tablice ATK są bardziej kompaktowe po złożeniu. Matryce dostarczają 3500 watów mocy, gdy Cygnus leci w pozycji skierowanej ku słońcu.
SM zawiera również Główny Napęd i System Kontroli Wysokości Statku Kosmicznego. Cygnus posiada silniki IHI BT-4 do manewrów korygujących orbitę. BT-4 został opracowany przez IHI Aerospace, Japonia i ma suchą masę 4 kilogramów i długość 0,65 metra. Silnik zapewnia ciąg 450 niutonów przy użyciu paliwa monometylohydrazynowego i utleniacza tetratlenku azotu. Materiały pędne są przechowywane w kulistych zbiornikach, które są pod ciśnieniem helu. System kontroli wysokości Cygnusa jest używany do reorientacji i małych rendezvous burns przy użyciu 32 monopropellant thrusters każdy z nominalnym ustawieniem ciągu 31 Newtonów.
Moduł serwisowy jest również wyposażony w system naprowadzania, nawigacji i kontroli pojazdu, jak również sprzęt komunikacyjny do komunikacji ze stacjami naziemnymi, ISS i Tracking and Data Relay Satellite System.

Cygnus jest wyposażony w Star Trackery i absolutny system GPS do określania swojej pozycji na orbicie podczas swobodnego lotu. Podczas Rendezvous z Międzynarodową Stacją Kosmiczną, Cygnus przełącza się na względny system GPS, aby określić swoją pozycję względem ISS. Rozpoczynając operacje zbliżeniowe, Cygnus zaczyna używać swojego systemu nawigacji zbliżeniowej.
Cygnus używa systemu TriDAR opracowanego przez firmę Neptec. TriDAR, czyli Triangulation and LIDAR Automated Rendezvous and Docking, to system nawigacji rendez-vous, który nie opiera się na żadnych znacznikach referencyjnych umieszczonych na celu. Zamiast tego, TriDAR używa laserowego czujnika 3D i kamer termowizyjnych do zbierania danych 3D celu, które są porównywane przez oprogramowanie ze znanym kształtem docelowego statku kosmicznego. To pozwala TriDARowi obliczyć względną pozycję, zasięg i względną prędkość. Algorytm komputerowy jest w stanie obliczyć względną pozycję w 6 stopniach swobody (6DOF) w czasie rzeczywistym, wykorzystując podejście More Information Less Data (MILD). „TriDAR działa w odległościach od 0,5 metra do ponad 2000 metrów bez poświęcania szybkości lub precyzji na którymkolwiek końcu zakresu” – twierdzi Neptec na stronie internetowej firmy.
ISS widziany przez Tridar
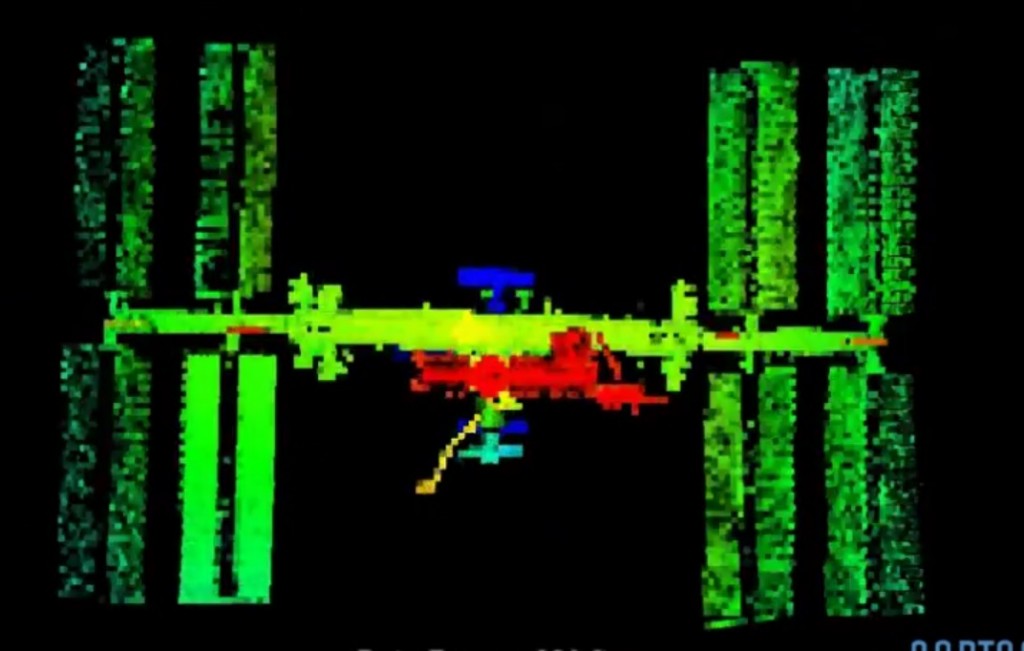
Sensor 3D firmy TriDAR łączy technologię autosynchronicznej triangulacji laserowej z radarem laserowym (LIDAR) w jednym pakiecie, aby zapewnić dane o śledzeniu w krótkim i długim zasięgu.
System triangulacji laserowej jest oparty na Laser Camera System (LCS) używanym w Orbiter Boom Sensor System promu kosmicznego, który był używany do przeprowadzania kontroli osłony termicznej pojazdu na orbicie.
TriDAR zapewnia funkcjonalność dwóch skanerów 3D poprzez multipleksowanie ścieżek optycznych dwóch aktywnych podsystemów. Kamera termowizyjna jest używana do rozszerzenia zasięgu systemu poza zasięg operacyjny LIDAR.
TriDAR został przetestowany w przestrzeni kosmicznej na misjach wahadłowców STS-128, STS-131 i ostatnim locie wahadłowca, STS-135.
Podczas STS-135, TriDAR rozpoczął śledzenie ISS z odległości 34 Kilometrów przez cały czas dokowania, a podczas od dokowania, system dostarczył imponujące obrazy ISS, zapewniając trójwymiarowe i termiczne obrazy Stacji jako część ostatniego lotu wahadłowca wokół ISS.
Profil lotu


Cygnus jest wystrzeliwany na szczycie rakiety Antares firmy Orbital, która dostarcza go na orbitę o wymiarach 250 na 275 kilometrów, nachyloną pod kątem 51,66 stopnia 630 sekund po starcie. Stamtąd Cygnus rozpoczyna regulację orbity i manewry fazowe w celu połączenia się z ISS, która krąży wokół Ziemi na wysokości 410 kilometrów. W trakcie wczesnej części lotu Cygnus aktywuje swoje nadajniki i rozmieszcza swoje baterie słoneczne.
Pojazd przechodzi również szereg testów, aby upewnić się, że wszystkie systemy działają zgodnie z projektem. Wykorzystując trackery gwiazd i GPS, Cygnus wykonuje kilka spalań silnika, aby zwiększyć wysokość, by zbliżyć się do ISS.
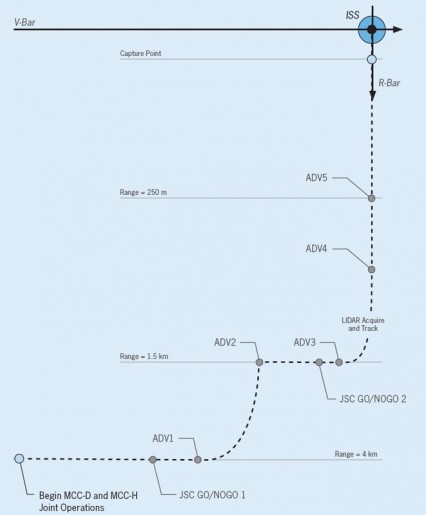
Gdy znajdzie się w 28-kilometrowej strefie komunikacyjnej wokół ISS, pojazd przełącza się na względny GPS, komunikując się z systemami GPS ISS, aby obliczyć swoją względną pozycję względem stacji. Cygnus zbliża się do ISS na R-Barze, nadlatując bezpośrednio spod ISS. Gdy pojazd zbliża się do ISS, przełącza się na system nawigacji zbliżeniowej TriDAR, aby kontynuować podejście końcowe.
Członkowie załogi na pokładzie ISS mogą komunikować się z Cygnusem za pośrednictwem panelu dowodzenia załogi, gdyby podczas Rendez-vous zdarzyło się coś nietypowego. Po osiągnięciu punktu oddalonego o 10 metrów od ISS, Cygnus zatrzymuje się i wchodzi w Wolny Dryf, aby zostać przechwyconym przez Canadarm2. Ramię robotyczne stacji kosmicznej jest sterowane przez członków załogi ISS, aby uchwycić statek kosmiczny.
Po uchwyceniu Cygnus zostaje przycumowany do nadirowego CBM modułu Harmony na ISS. Po zamocowaniu na miejscu zakończone zostają kontrole szczelności, a włazy między ISS a Cygnusem zostają otwarte, aby umożliwić członkom załogi dostęp do modułu ładunkowego. W trakcie misji dokowania, zwykle 30 dni, członkowie załogi przenoszą ładunek z Cygnusa do ISS i ładują pojazd śmieciami i niepotrzebnymi już przedmiotami.
Po ponownym zamknięciu włazów Canadarm2 przenosi Cygnusa z powrotem na odległość 10 metrów i uwalnia pojazd, który następnie wykonuje kilka spalań silnika, aby opuścić okolice ISS. Po osiągnięciu bezpiecznej odległości Cygnus przeprowadza spalanie deorbitacyjne, aby ponownie wejść w atmosferę nad Oceanem Spokojnym. Podczas ponownego wejścia, pojazd rozpada się i spala do pewnego stopnia, zanim ocalałe fragmenty spadną do Pacyfiku, z dala od zaludnionych mas lądowych.
