Cygnus Spacecraft

Il Cygnus Spacecraft è un veicolo spaziale senza equipaggio per il rifornimento di merci progettato e gestito da Orbital Sciences Corporation.
Il programma Cygnus è iniziato come parte del programma COTS (Commercial Orbital Transportation Services Program) della NASA ed entra nel programma Commercial Resupply Services una volta completato il suo primo volo di dimostrazione.
Cygnus trasporta carichi pressurizzati alla Stazione Spaziale Internazionale.
La navicella viene lanciata in cima al razzo Antares di Orbital che decolla dal Mid-Atlantic Regional Spaceport, Virginia. Cygnus non è in grado di riportare il carico sulla Terra e brucia al rientro per smaltire se stesso e gli oggetti non più necessari della ISS.
| Standard | Migliorato | |
| Lunghezza | 5.14m | 6.39m |
| Diametro | 3.07m | 3.07m |
| Massa secca | 1.500kg | 1.800kg |
| Volume pressurizzato | 18.9m³ | 27m³ |
| Massa di carico | 2.000kg | 3.500kg |
| Carico utile di smaltimento | 1.200kg | 3,500kg |
| Endurance | 2 mesi | 66 giorni |
| Solar Arrays | Spazio olandese | ATK Ultra Flex |
| RNDZ Nav | TriDAR | TriDAR |
Cygnus consiste in un modulo di carico pressurizzato costruito dall’italiana Thales Alenia Space e un modulo di servizio costruito da Orbital, basato sul bus satellitare GEOStar di Orbital e sugli elementi della navicella Dawn per ridurre costi e rischi.
Cygnus è prenotato per una singola missione COTS Demo verso la ISS e un totale di otto voli CRS. Per i suoi primi quattro voli, Cygnus vola nella sua configurazione standard. Quando l’Antares sarà aggiornato con il secondo stadio Castor 30 XL, Cygnus passerà alla sua versione migliorata per trasportare più carico alla ISS. Cygnus standard porta 2.000 kg di carico alla ISS mentre la versione potenziata ha una capacità di carico di 3.500 kg, limitata dalle prestazioni del veicolo di lancio.
Cygnus può essere caricato con oltre tre tonnellate metriche di spazzatura e oggetti non più necessari per il suo infuocato ritorno sulla Terra.

Modulo di carico pressurizzato

Cygnus standard e Cygnus enhanced utilizzano moduli cargo pressurizzati costruiti da Thales Alenia Space, Italia. Il modulo è basato sul Multi Purpose Logistics Module che ha volato in diverse missioni dello Space Shuttle per trasportare carichi pressurizzati sulla ISS.
Ha un diametro di 3,07 metri e una lunghezza di 3,66 metri nella sua configurazione standard e di 5,05 metri con un segmento aggiunto nella configurazione potenziata. Il PCM standard ha una massa secca di 1.500 chilogrammi e la versione migliorata pesa 1.800 kg. 2.700 chilogrammi di carico possono essere imballati nel PCM standard, mentre la versione migliorata permette di caricare 800 kg in più. Il modulo di carico ha un volume pressurizzato di 18,9 metri cubi nella configurazione standard e 27 metri cubi nella configurazione migliorata. Il consumo di energia del PCM è inferiore a 850 watt.
Il PCM ha un portello di 94 per 94 centimetri che è integrato nell’anello del meccanismo di attracco comune di 127 centimetri. Come tutti gli altri veicoli in visita, Cygnus presenta il lato passivo del CBM mentre la ISS è dotata di un Common Berthing Mechanism attivo.
Il PCM è in grado di contenere 3.500 kg di carico per lo smaltimento tramite rientro distruttivo.
Modulo di servizio

Situato nella sezione poppiera della navicella, il Cygnus Service Module fornisce la generazione di energia & di stoccaggio, il controllo del veicolo, la propulsione, la guida e il Grapple Fixture per il braccio robotico della Stazione. L’SM è basato sul bus satellitare GEOStar di Orbital e utilizza elementi della navicella Dawn della NASA che è stata prodotta da Orbital. Misura 3,23 metri di diametro e 1,29 metri di altezza.
SM è dotato di array solari dispiegabili, batterie e avionica per la generazione, lo stoccaggio e la distribuzione di energia. I pannelli solari genereranno fino a 4 kilowatt di potenza elettrica.
Il Cygnus standard ha due pannelli solari a tre pannelli forniti da Dutch Space. Il Cygnus migliorato dispone di array solari Ultra Flex costruiti da Alliant Techsystems, ATK. Gli array circolari sono dispiegati da motori di guida e sono di un design leggero del 25% della massa dei tipici array solari composti da pannelli. Inoltre, gli array di ATK sono più compatti quando vengono stivati. Gli array forniscono 3.500 Watt di potenza quando Cygnus vola in un atteggiamento rivolto al sole.
L’SM contiene anche il sistema di propulsione principale e di controllo dell’assetto del veicolo spaziale. Cygnus dispone di propulsori IHI BT-4 per le manovre di regolazione dell’orbita. BT-4 è stato sviluppato da IHI Aerospace, Giappone e ha una massa secca di 4 chilogrammi e una lunghezza di 0,65 metri. Il motore fornisce 450 Newton di spinta utilizzando combustibile Monometilidrazina e ossidante tetrossido di azoto. I propellenti sono immagazzinati in serbatoi sferici che sono pressurizzati con elio. Il sistema di controllo d’assetto di Cygnus è usato per il riorientamento e per piccoli rendezvous usando 32 propulsori monopropellenti ciascuno con una spinta nominale di 31 Newton.
Il modulo di servizio è anche equipaggiato con il sistema di guida, navigazione e controllo del veicolo così come le apparecchiature di comunicazione per comunicare con le stazioni di terra, la ISS e il sistema satellitare Tracking and Data Relay.

Cygnus è equipaggiato con Star Tracker e sistema GPS assoluto per determinare la sua posizione in orbita durante il volo libero. Durante il Rendezvous con la Stazione Spaziale Internazionale, Cygnus passa al GPS relativo per determinare la sua posizione rispetto alla ISS. Quando inizia le operazioni di prossimità, Cygnus inizia ad usare il suo sistema di navigazione di prossimità.
Cygnus usa un sistema TriDAR sviluppato da Neptec. TriDAR, o Triangulation and LIDAR Automated Rendezvous and Docking, è un sistema di navigazione per il rendezvous che non si basa su alcun marcatore di riferimento posizionato sul suo obiettivo. Invece, TriDAR utilizza un sensore 3D basato su laser e imager termici per raccogliere dati 3D del suo obiettivo che viene confrontato dal software con la forma nota del veicolo spaziale di destinazione. Questo permette a TriDAR di calcolare la posizione relativa, la portata e la velocità relativa. L’algoritmo del computer è in grado di calcolare la posa relativa a 6 gradi di libertà (6DOF) in tempo reale utilizzando un approccio MILD (More Information Less Data). “TriDAR opera a distanze che vanno da 0,5 metri a oltre 2000 metri senza sacrificare la velocità o la precisione a entrambe le estremità della gamma”, dice Neptec sul sito web della società.
ISS visto da Tridar
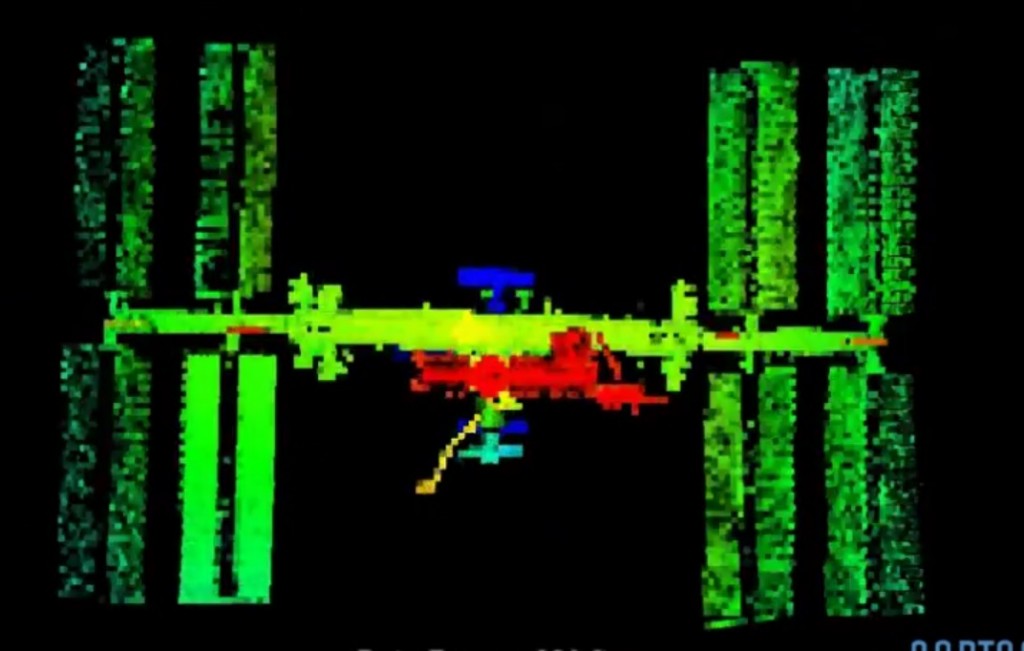
Il sensore 3D di TriDAR combina la tecnologia di triangolazione laser auto-sincrona con il radar laser (LIDAR) in un unico pacchetto per fornire dati di tracciamento a breve e lungo raggio.
Il sistema di triangolazione laser è basato sul Laser Camera System (LCS) utilizzato sul sistema di sensori Orbiter Boom dello Space Shuttle, utilizzato per eseguire ispezioni dello scudo termico del veicolo in orbita.
TriDAR fornisce la funzionalità di due scanner 3D multiplexando i due percorsi ottici del sottosistema attivo. L’imager termico viene utilizzato per estendere la portata del sistema oltre la gamma operativa del LIDAR.
TriDAR è stato testato nello spazio sulle missioni Space Shuttle STS-128, STS-131 e l’ultimo volo dello Shuttle, STS-135.
Durante STS-135, TriDAR ha iniziato a tracciare la ISS da 34 chilometri fino al docking, e durante l’undocking, il sistema ha fornito immagini impressionanti della ISS, fornendo immagini 3D e termiche della Stazione come parte dell’ultimo flyaround della ISS basato sullo Shuttle.
Flight Profile


Cygnus viene lanciato in cima al razzo Antares di Orbital che lo porta su un’orbita di 250 per 275 chilometri inclinata di 51,66 gradi 630 secondi dopo il lancio. Da lì, Cygnus inizia le regolazioni dell’orbita e le manovre di fasatura al fine di collegarsi con la ISS che orbita intorno alla Terra ad un’altitudine di 410 chilometri. Nel corso della prima parte del volo, Cygnus attiva i suoi trasmettitori e dispiega i suoi pannelli solari.
Inoltre, il veicolo viene sottoposto a una serie di controlli per assicurarsi che tutti i sistemi funzionino come previsto. Usando gli star tracker e il GPS, Cygnus esegue diverse bruciature dei motori per aumentare la sua altitudine e avvicinarsi alla ISS.
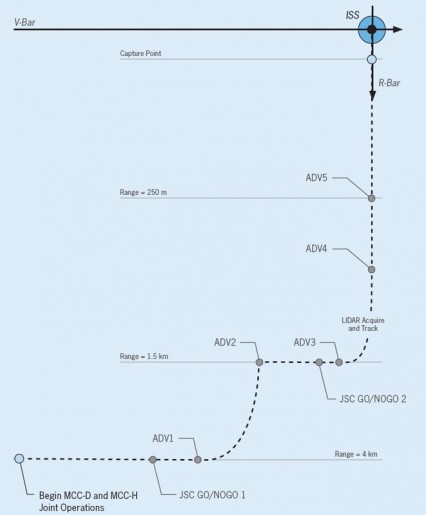
Una volta nella zona di comunicazione di 28 chilometri intorno alla ISS, il veicolo passa al GPS relativo, comunicando con i sistemi GPS della ISS per calcolare la sua posizione relativa alla stazione. Cygnus si avvicina alla ISS sulla R-Bar, arrivando da direttamente sotto la ISS. Man mano che il veicolo si avvicina alla ISS, passa al suo sistema di navigazione di prossimità TriDAR per continuare l’avvicinamento finale.
I membri dell’equipaggio a bordo della ISS possono interagire con Cygnus tramite il pannello di comando dell’equipaggio se dovesse verificarsi qualcosa di anomalo durante il Rendezvous. Una volta raggiunto un punto a 10 metri dalla ISS, Cygnus ferma il suo approccio ed entra in Free Drift per essere catturato dal Canadarm2. Il braccio robotico della stazione spaziale è controllato dai membri dell’equipaggio della ISS per afferrare il veicolo spaziale.
Una volta afferrato, Cygnus è attraccato al CBM di nadir del modulo Harmony della ISS. Una volta fissato in posizione, i controlli di tenuta sono completati e i portelli tra ISS e Cygnus sono aperti per consentire ai membri dell’equipaggio di accedere al modulo di carico. Nel corso della sua missione agganciata, in genere 30 giorni, i membri dell’equipaggio spostano il carico da Cygnus alla ISS e caricano il veicolo con spazzatura e oggetti non più necessari.
Una volta che i portelli sono nuovamente chiusi, Canadarm2 sposta Cygnus di nuovo fuori a 10 metri e rilascia il veicolo che poi esegue una serie di bruciature del motore per lasciare la vicinanza della ISS. Una volta a distanza di sicurezza, Cygnus esegue la sua combustione di deorbita per rientrare nell’atmosfera sopra l’Oceano Pacifico. Durante il rientro, il veicolo si rompe e brucia in parte prima che i frammenti sopravvissuti cadano nel Pacifico, lontano dalle masse terrestri popolate.
